
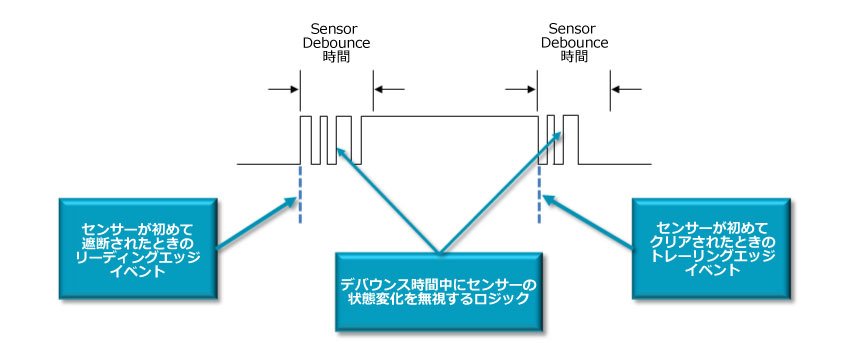
Sensor Debounce 設定とは、状態が変化した後にロジックがセンサー入力の状態を保持する時間です。これは最初にセンサーをブロックした時の、 搬送物検出前の遅れではない点 に留意ください。
| モジュールは搬送物の前の端を検知して、この状態を センサーの跳ね返り 時間の間保存します。 同様に、搬送物の後ろの端がセンサーを通過した時、ロジックは センサー跳ね返り 時間の間この状態を保存します。 | ||
 |
| 希望の値を秒で入力し、Setボタンをクリックします。 デフォルトは0.1秒で有効範囲は0~2秒です。この設定は 左右センサーポート の 両方 に適用されます。この例では0.2秒を入力しています。 |  |