
オープンループ
オープンループの速度制御が必要な場合は、EasyRollで両方のモーターを同じ設定にします。
クローズドループ
クローズドループ制御を使用する場合、 両方のモーターを決してクローズドループ制御にしない ことが重要です。加速時と減速時にモーターが互いに「喧嘩」してしまうからです。
選択したConveyLinxに対して、EasyRollで以下の基本手順を実行してください。:
 |
||
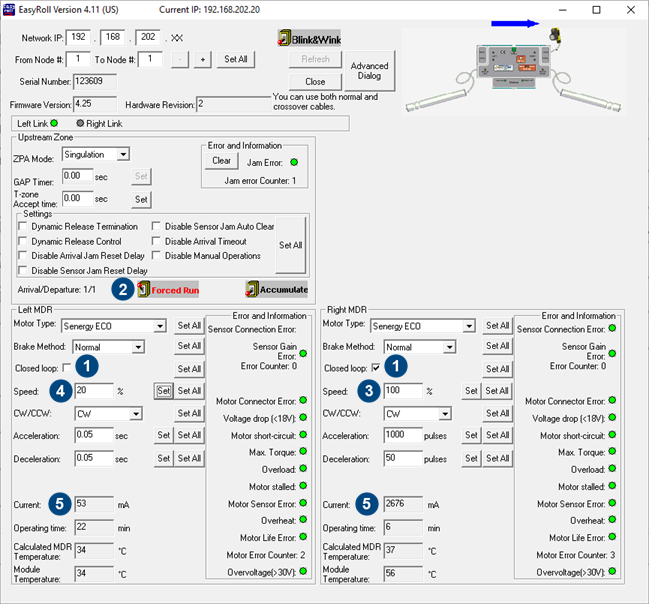
| 搬出側の端のモーターをクローズドループに、搬入側の端のモーターをオープンループにする。 | ||
| 強制的に実行して、両方のモーターを動かす。 | ||
| クローズドループのモーターのゾーンの希望速度を入力する。 | ||
| オープンループのモーターに低速を入力する。 | ||
| オープンループのモーター電流が 0でないこと、およびクローズドループの電流が定格電流の範囲内であることを確認する。 | ||
 |
||
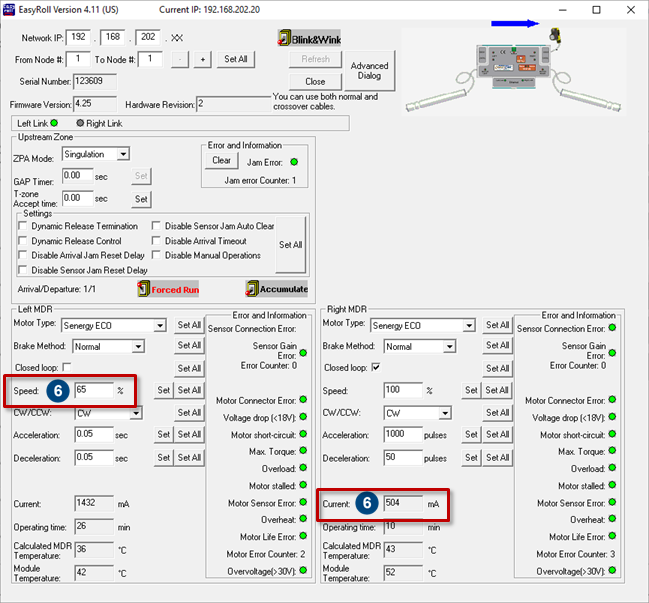
| クローズドループのモーターの電流が約500~800mAになるまで、 オープンループのモーター速度を調整する。 | ||
| ここに表示されている速度値は一例であり、実際の速度や電流値は異なる場合があることに注意。 | ||
 |
||
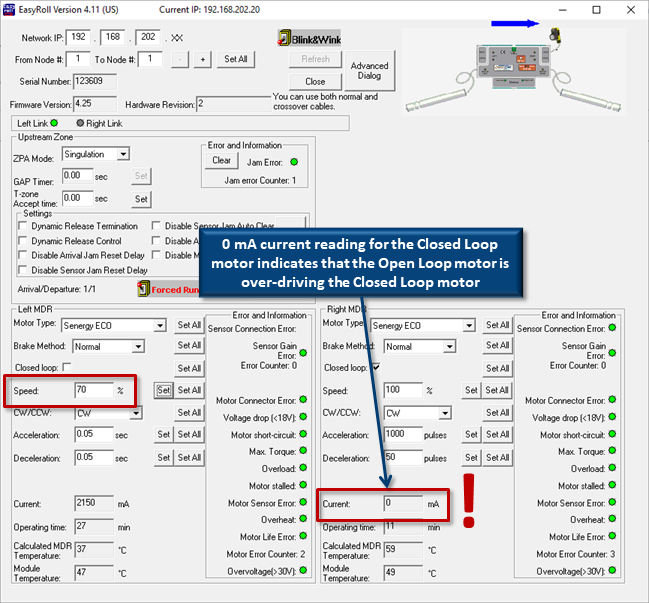
| クローズドループのモーターの電流を0mAにするために、オープンループのモーターの速度を 高く設定しすぎないこと が重要。 | ||
| この例では、以前はオープンループのモーター速度を65%に設定すると、クローズドループのモーターに@500mAの電流が流れていた。しかし、オープンループのモーター速度を70%に調整すると、クローズドループのモーターの電流は0mAになる。これは最終的に、クローズドループのモーターにオーバーヒートエラーを引き起こす。 | ||