この例では、 ConveyLinx-Aiシリーズ の左パルスローラのPLC制御を使用して以下の手順を実行します。
- PLCからConveyLinxへの外部入力 (センサーまたはオペレーターボタン)による、ゼロ位置または基準位置の確立。
- 加速ランプ100 mm、 減速ランプ50 mmで、0.8 m/s の速度で反時計方向に7000 mm回転させる。
- 加速ランプ50 mm、減速ランプ10 mmで、1.0 m/s の速度で時計方向に9000 mm回転させる。
- 加速ランプ50 mm、 減速ランプ10 mmで、0.8 m/s の速度でゼロ位置または原点位置に反時計回転で戻る。
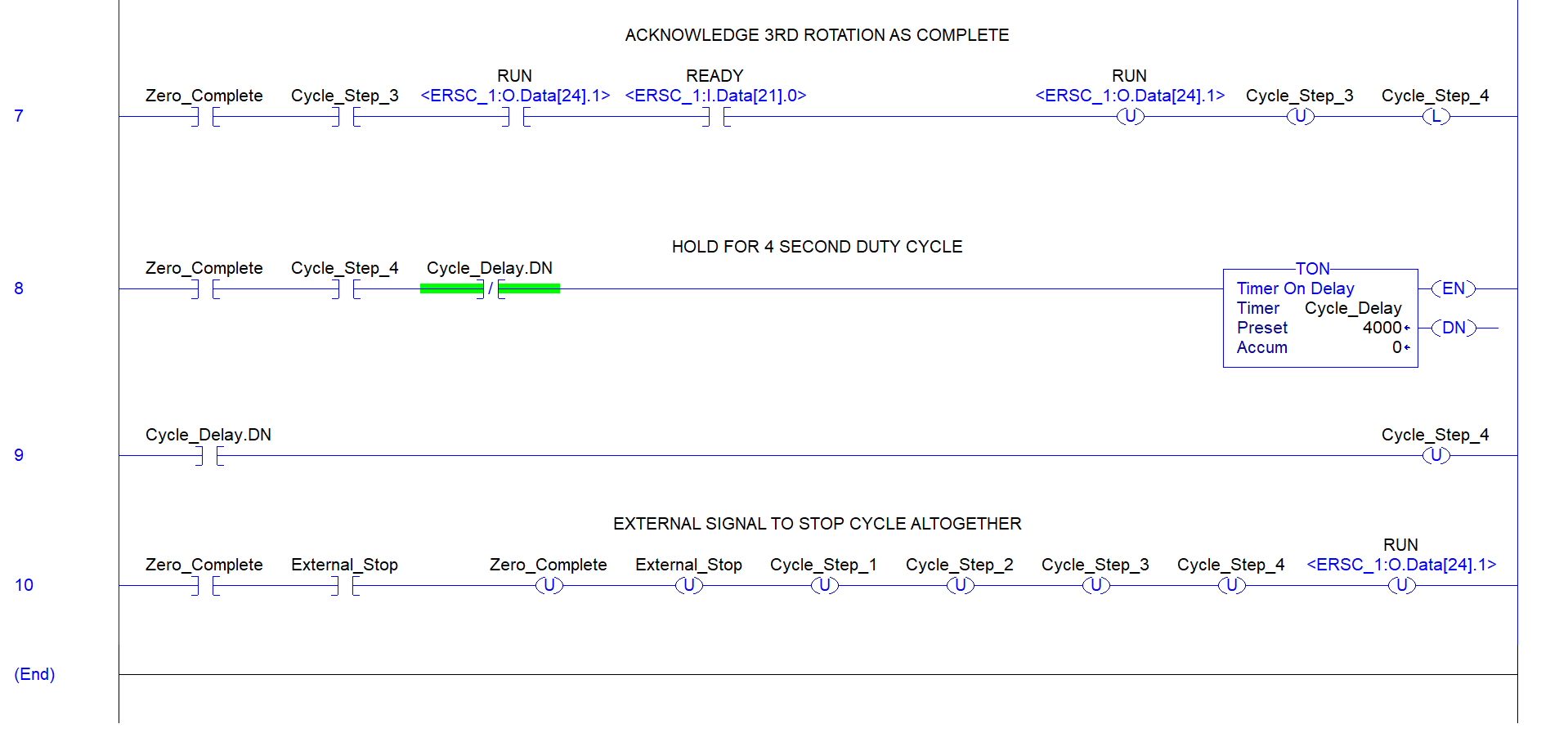
- 一周期の滞留時間4秒間待ってから、回転周期を繰り返す。
PLCタグの意定義
| タグ名 | データタイプ | アセンブルレジスタ (/bit) |
|---|---|---|
| ZERO | ブーリアン | Left Servo Command Word – bit 0 |
| ZERO_ACK | ブーリアン | Left Motor Servo Status – bit 1 |
| RUN | ブーリアン | Left Servo Command Word – bit 1 |
| READY | ブーリアン | Left Motor Servo Status – bit 0 |
| POSITION | 整数 | Left Servo Command Pulses |
| SPEED | 整数 | Left Motor Speed Reference |
| ACCEL | 整数 | Left Motor Acceleration Ramp |
| DECEL | 整数 | Left Motor Deceleration Ramp |
操作手順
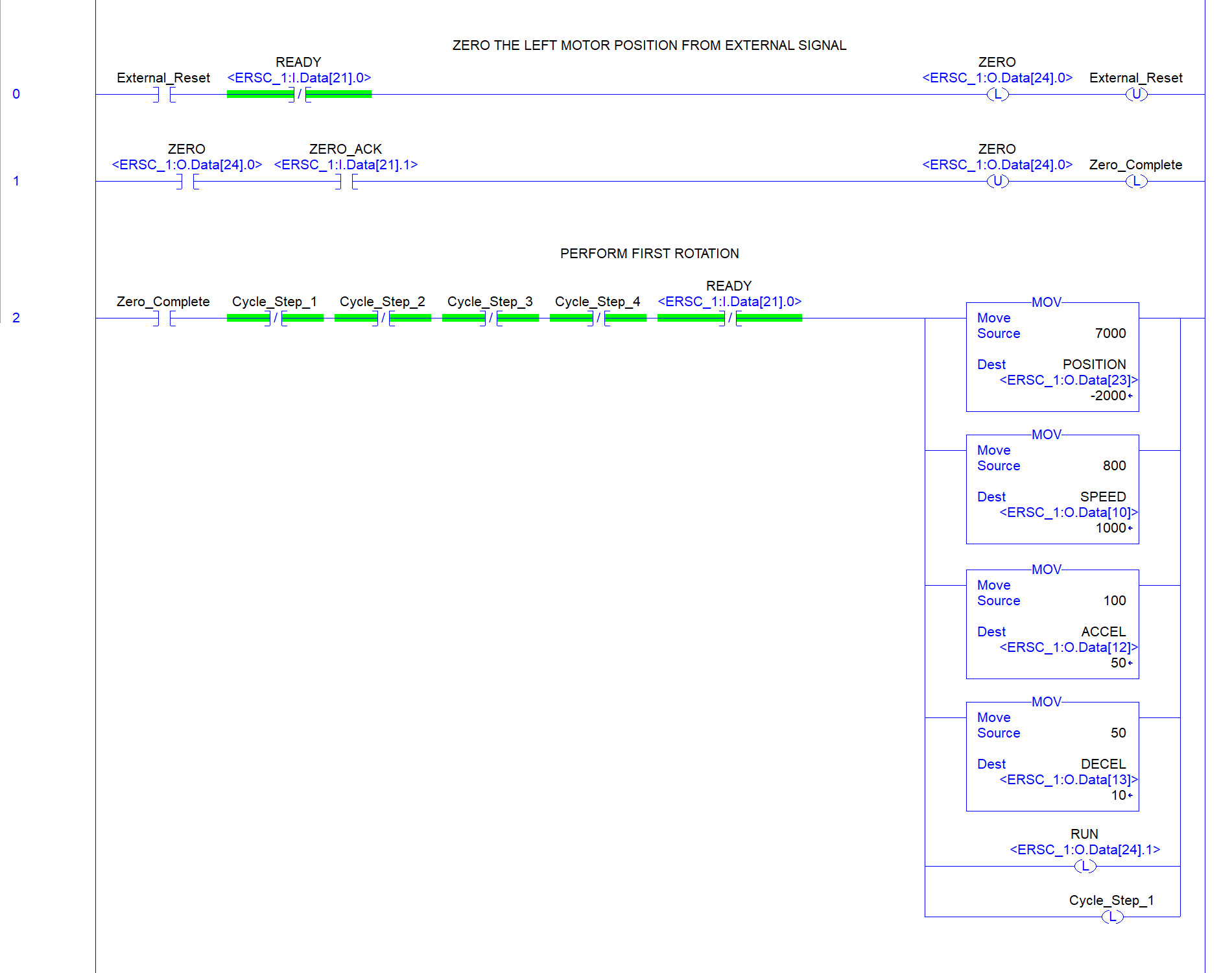
ステップ #1: センサーまたはボタンからの外部信号により、ZEROビットを設定してゼロまたは「基準」位置を確立する。ZERO_ACKビットが設定されたことをPLCが確認すると、 PLCはZEROビットをリセットする。
ステップ #2: 最初の回転を行うには、速度、ランプ値、回転距離を適切なレジスタに書き込む必要がある。
- SPEED に800を書き込む。
- ACCEL に100を書き込む。
- DECEL に50を書き込む。
- POSITION に7000を書き込む。
ステップ #3: READYがリセットされると、PLCはRUNビットを設定して回転を開始できる。回転が完了すると、ConveyLinxはREADYビットを設定するが、これはRUNビットをリセットするためのPLCへの信号となる。RUNビットがリセットされたことを確認すると、ConveyLinxはREADYビットをリセットする。
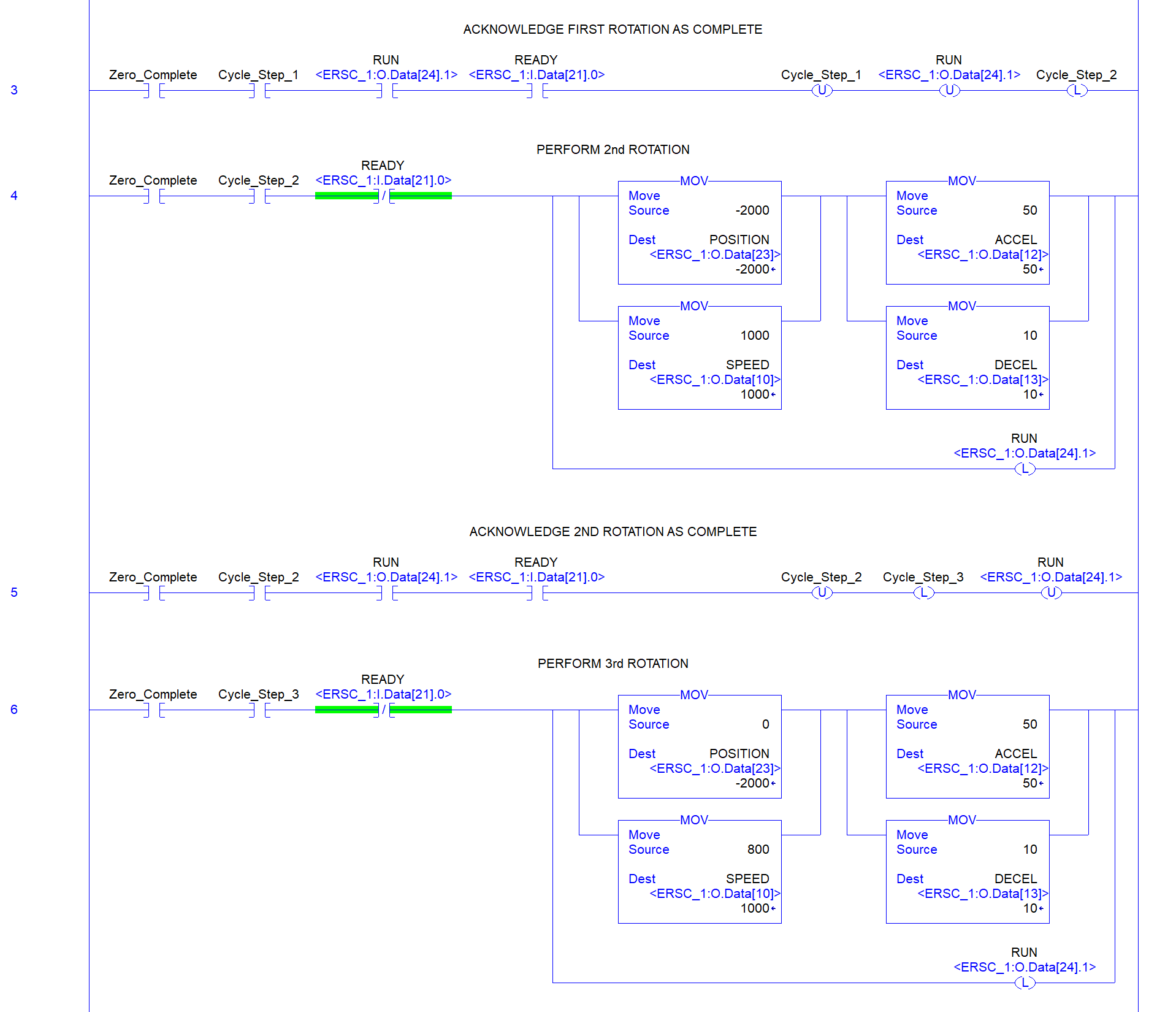
ステップ #4: 2回目の回転では、速度とランプ値を適切なレジスタに書き込む。
- SPEEDに1000を書き込む。
- ACCELに50を書き込む。
- DECELに10を書き込む。
逆方向に回転させたいため、ゼロまたは「基準」位置に基づいて新しい位置を決定する必要がある。この場合、7000 mm 「前進」 したことが分かっているので、9000 mm 「後退」したい。最終的に到達したい位置は、7000-9000 =-2000である。
- POSITIONに-2000を書き込む。
ステップ #5: ステップ#4 の繰り返し。
ステップ #6: 3回転目では、2回転目のランプ値を維持するが、速度と回転位置を設定する必要がある。この場合、ゼロまたは「基準位置」にする。
- SPEEDに800を書き込む。
- POSITIONに0を書き込む。
ステップ #7: ステップ #4 の繰り返し。
PLCラダー図