| レジスタ名/モジュールアドレス | PLC用アセンブルアドレス | 説明 |
|---|---|---|
| Left Motor Current 4:0055 |
M: 4:1704 E: I.Data [4] P: Byte 8 (Hi) Byte 9 (Lo) |
モーター電流の整数値(mA) 例: 1900 = 1.9 Amps |
| Left Motor Frequency 4:0056 |
M: 4:1705 E: I.Data [5] P: Byte 10 (Hi) Byte 11 (Lo) |
モーターの電気周波数の整数値(Hz) 例: 300 = 300 Hz |
| Left Motor Temperature 4:0057 |
M: 4:1706 E: I.Data [6] P: Byte 12 (Hi) Byte 13 (Lo) |
温度の上位バイト/下位バイト (°C ) 上位バイト = モーターの温度 下位バイト = モジュールの温度 |
| Left Motor Status 4:0058 |
M: 4:1707 E: I.Data [7] P: Byte 14 (Hi) Byte 15 (Lo) |
ビット単位の値 – 読み取りのみ: ビット 0 = モーターの回転状況 ビット 1 = モーターの回転状況 ビット 2 = デジタルモードのポート ビット 3 = 予約済 ビット 4 = 予約済 ビット 5 = 基盤オーバーヒート ビット 6 = 過電圧 ビット 7 = 低電圧 ビット 8 = ビットのオーバーヒート ビット 9 = 過電流 ビット 10 = 回路短絡 ビット 11 = モーター未接続 ビット 12 = 過負荷 ビット 13 = 停滞 ビット 14 = センサーエラー ビット 15 = モーター未使用 |
| Left Motor Real Speed 4:0507 |
M: 4:1723 E: I.Data [23] P: Byte 46 (Hi) Byte 47 (Lo) |
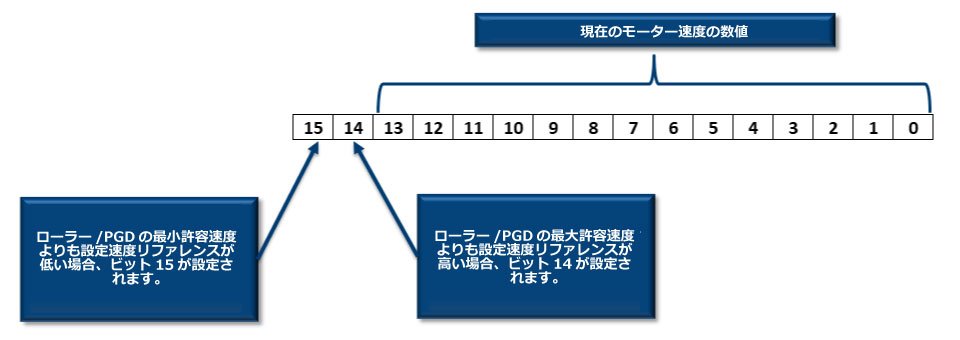
モーター回転数と速度ステータス ビット 00 ~ ビット13 = 数値または現在の速度 * MDRの場合の値: mm/sec * PGDの場合の値: RPM x 10 ビット 14: 1 = 設定速度がモーターの最高回転速度を超えている。 ビット 15: 1 = 設定速度がモーターの最低回転速度を下回っている。 |
モーターの回転ステータス
ビット0と1は4つの可能性のある状態を表すために組み合わせて使用されます。以下のチャートはそれら状態のビット値を定義したものです。
| Bit 1 | Bit 0 | Description |
|---|---|---|
| 0 | 0 | モーターが動作していない状態、 ノーマルモードあるいはサーボブレーキモード適用 |
| 0 | 1 | モーターが反時計回りで動作 |
| 1 | 0 | モーターが時計回りで動作 |
| 1 | 1 | モーターが動作していない状態、フリーブレーキモード適用 |
モーター周波数
これは動作中の場合のモーターの電気周波数の現在地を含みます。Senergyモーターの場合、 電気周波数÷5=機械周波数です。機械周波数は1秒毎のモーター回転数です。 この値をギアボックスの機械的ギア比と併用して実際のモーター回転数を算出することができます。ご使用の型式のギア比の値については、Pulserollerカタログをご参照ください。
モーター実速度
Aiモーター技術は特定のモーターのデータを符号化してモーター内にあるメモリーチップに埋め込みます。このデータは ConveyLinx-Aiシリーズ によって読み取られます。このデータには最小と最大速度設定を含むモーターの機械的特性が入っています。速度参照レジスタには、接続されたモーターの許容範囲外の値を入力することができます。最大値より大きい値を入力すると、速度は最大に設定されます。最小値より小さい値を入力した場合は、最小速度に設定されます。
モーター実速度 入力レジスタについては、そのビット14と15のレジスタを監視することで、速度参照レジスタに入力された値が許容範囲外であるかどうかを知ることができます。
例
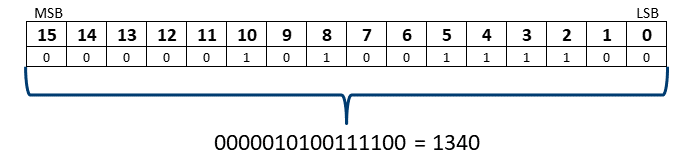
例えば、最大速度が1.34 m/s のパルスローラがあるとします。この速度では、実速度入力レジスタの値は1340(速度mm/s)に非常に近いか等しい10進数を表します。
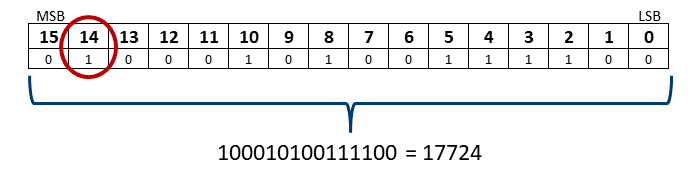
速度参照に2.0 m/s の値(速度参照 レジスタに2000の値) を入力しモーターを作動させると、モーターの 実速度 入力レジスタには17724に非常に近いか等しい10進値が表示されます。この値をビットレベルで分析すると、 ビット14が設定されており、 つまり 速度参照 の値が最大値を超えているということが分かります。
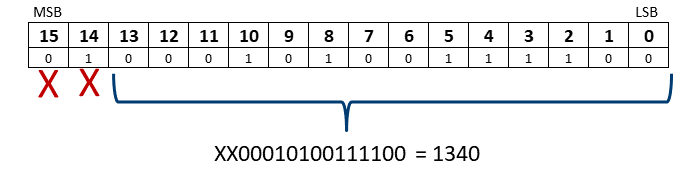
この値からビット14を取り除くと、残りの10進値(つまり、ビット0~13の2進値)は、パルスローラで許容される最高速度である1340に非常に近いか等しくなります。同様に、入力された 速度参照 値が最小値を下回ると、ビット15がモーターの 実速度 レジスタに設定されます。ビット15を除いたビット0~13の2進値は、モーターの許容最小速度に非常に近いか等しい値を示します。