
この例では、バーコードスキャン領域で搬送物を簡単に単一化するコンベア制御の設定方法を提示します。
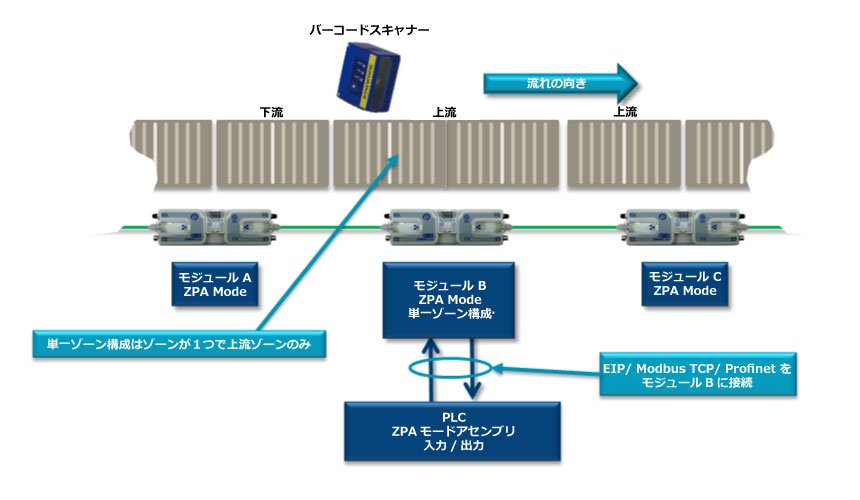
この例では、 モジュールB は単一ゾーンとして論理的に構成されなければいけません。これは1つのパルスローラと1つのセンサーを持つ単一の長いゾーン、または2つのパルスローラと1つのセンサーを持つ単一の長いゾーンのいずれかになります。
この例が正しく機能するためには、 モジュールA の搬出ゾーンと モジュールB の単一ゾーンがデフォルトの シンギュレーション搬送 モード( トレインモード ではなく)でなくてはなりません。 モジュールA では 到着ジャムも無効にしてはいけません。
ZPA機能が組み込まれているため、搬送物が モジュールA の搬出ゾーンを離れると、 モジュールA は モジュールB から搬送物到着の確認を受け取るまで待機します。新しい搬送物が モジュールA に到着すると、この到着確認が行われるまで集積されます。 モジュールB は単一の長いゾーンであるため、 モジュールB の上流ゾーン(2ゾーンとして構成されている場合)であった場所は、搬送物が モジュールB に集積される時は基本的に空いたままになります。これはバーコードスキャナーがあるエリアです。この構成では、 モジュールB への新しい到着はバーコードリーダーからの最後のスキャンに関連付けられた搬送物であることが確実になります。この例では、PLCは モジュールB との接続を確立してから、 基本的な集積と搬送 の説明に従いゾーン制御を行う必要があります。