
ゾーンが搬送物を搬送している間、この搬送物がジャムタイマーの時間 (デフォルトは5秒)光電センサーをブロックし続けると、ConveyLinx-ECOはセンサージャムを検出します。
この場合対応する モジュールのセンサーLEDに以下のように 表示されます。
| 搬送物1 はゾーン1 を通過しているが、停滞している。 ゾーン1 とゾーン 2 のモーターは作動しているが、光電センサー(PE1)はブロックされたまま。 |  |
| ジャムタイマーの時間(デフォルトでは5秒)が過ぎると、ゾーン1とゾーン2のモーターが停止し、ゾーン1のセンサーLEDが自動搬出時間(デフォルトでは5秒)の間、緑/琥珀色に点滅する。 | 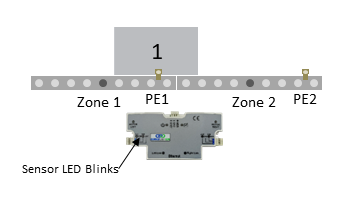 |
| 自動搬出動作時間が切れると、ゾーン1はセンサージャムエラー状態自動解除手順を開始する。 |  |
- センサージャムエラー状態自動解除手順開始時の流れは以下の通り。
- センサーが解除になるか、1秒経過か、どちらか早い方までモーターローラーが逆回転する。
- 自動搬出動作時間が切れるのを待つ。
- モーターローラーを正回転させ、下流ゾーンへの搬出を試みる。 (試行#1 完了)
- 搬出試行後もセンサーがまだブロックされている場合、 センサーが解除になるか、1秒経過か、どちらか早い方までモーターローラーが逆回転する。
- 自動搬出動作時間が切れるのを待つ。
- モーターローラーを正回転させ、下流ゾーンへの排出を試みる。(試行 #2 完了)
- 搬出試行後もセンサーがまだブロックされている場合、センサーが解除になるか、1秒経過か、どちらか早い方までモーターローラーが逆回転する。
- 自動搬出動作時間が切れるのを待つ。
- モーターローラーを正回転させ、下流ゾーンへの搬出を試みる。 (試行 #3 完了)
- 試行#3後もセンサーがまだブロックされている場合、センサージャム状態をリセットするためには手動でセンサーを解除する必要がある。下流への搬出の試行 (手順3、6、9)のいずれかが成功した場合は、センサージャム状態は自動的にリセットされる。
このトピックへフィードバック