
设备驱动程序的通信方法部分指出了从大脑到硬件执行命令的方法。
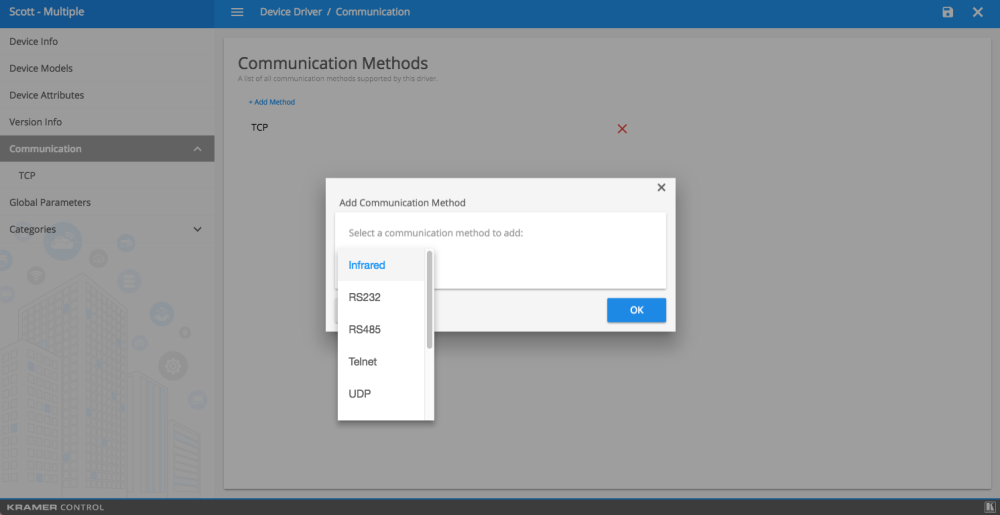
每种通讯类型都有不同的设置,可以在驱动程序中进行编辑
红外线
IR是最基本的控制方法。IR要求将发射器连接到受控设备的IR接收位置。红外控制是一种方法,这意味着无法从本机接收到任何反馈。*注释* 构建器 IR设备是使用“虚拟状态”的好时机::https://www.manula.com/manuals/kramer/kramer-control/1/zc/topic/device-attributes
- 重复
**重复是在客户端中按一次单个按钮将发送驱动程序数据字符串的次数。行业标准为3,但是某些设备可能需要或多或少的重复。*技术提示* 如果您注意到在客户端上按一下单个按钮后该命令已执行了多次,则表明重复计数太高,应从设备驱动程序编辑器中的计数降低。
- 命令传输
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
- 全局命令详细信息 – 通常不与IR命令一起使用
**如果协议的每个命令都有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。
RS232
通常称为串行控制,RS232在大脑硬件和被控制设备之间需要一条特殊的电缆。*技术提示* 特殊电缆可以是直通电缆或零调制解调器/交叉电缆。RS232控制通常采用两种执行命令方式。如果设备支持命令,将收到指示设备状态的反馈。*注释* 所有Kramer硬件解决方案均包括用于GND(接地)、Tx(发送)和Rx(接收)的裸线电缆连接。
*串行设置
**这些设置包括支持的波特率。波特率将在协议文档中列出,并且所有受支持的速率都应在编辑器的此部分中选择。您还需要指出默认的波特率、奇偶校验、数据位、起始位、停止位、流量控制和接线类型。
*命令传输
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
*全局命令详细信息
**如果协议的每个命令都有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都有前缀或后缀,但是当您知道设备以回车符终止所有命令时,后缀更为常见。如果是这种情况,请输入\x0D作为反馈的后缀。
RS485
与串行控制类似,RS485需要在大脑硬件和被控制设备之间使用特殊电缆。RS485控制有两种执行命令的方式。如果设备支持命令,则收到指示设备状态的反馈。
*串行设置
**这些设置包括支持的波特率。波特率将在协议文档中列出,并且所有受支持的速率都应在编辑器的此部分中选择。您还需要指出默认的波特率、奇偶校验、数据位、起始位、停止位、流量控制和接线类型。
*命令传输
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
*全局命令详细信息
**需要指示命令的开始(前缀)和结束(后缀),以便大脑知道相关信息在单元响应中的位置。如果协议的每个命令具有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
*全局反馈参数
**需要指示反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在单元响应中的位置。并非所有设备都具有前缀或后缀。当您知道设备以回车符终止所有命令时,通常会使用后缀。
*注释*在Kramer Control系统中,回车符编写为\x0D,换行符编写为\x0A。
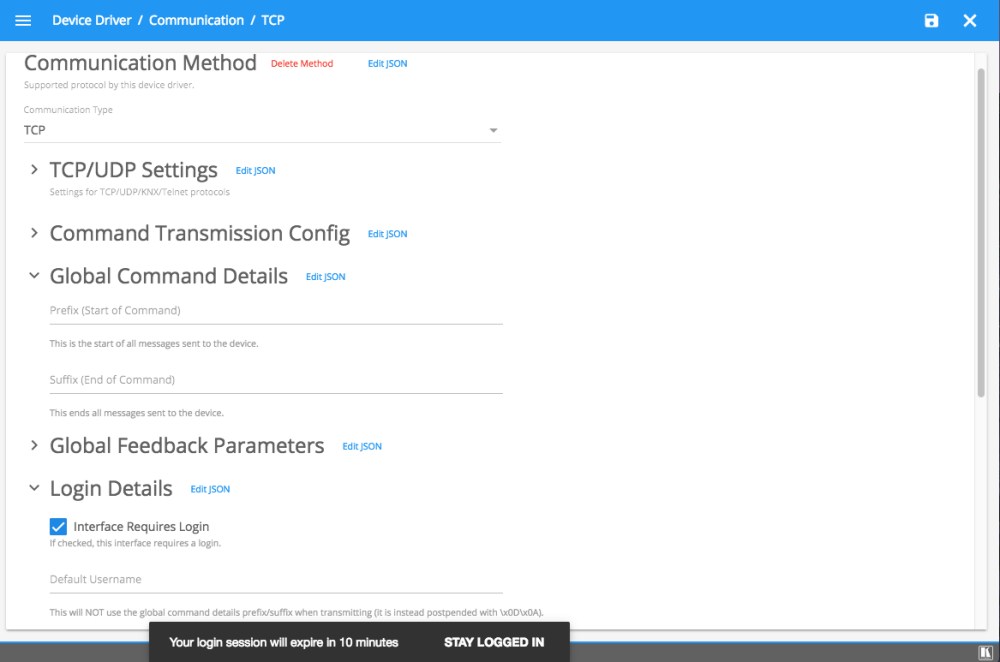
h2. TCP
TCP控制不需要在大脑和硬件之间进行任何其他布线。TCP控制是一种网络类型的通信方法,并且需要在“构建器”中使用网络网关。*技术提示* 唯一需要的布线是网线,为硬件提供有效的IP地址。被控制的网络设备必须与大脑硬件位于同一网络上。
- TCP / UDP设置
**此选项识别大脑通过网络传递数据所需的端口。
*命令传输
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
*全局命令详细信息
**需要指明命令的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。如果协议的每个命令具有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都具有前缀或后缀。*技术提示* 当您知道设备以回车符终止所有命令时,通常会使用后缀。
*注释*在Kramer Control系统中,回车符编写为\x0D,换行符编写为\x0A。
- 登录详细信息
**如果被控制的设备需要先登录才能执行命令,则在此标识登录凭据。确保在登录部分的用户名和密码中区分大小写。*技术提示* 使用Hercules、Docklight或Terminal等软件进行的测试可以帮助您确定受控设备的正确登录凭据。
**当设备要求以唯一的方式输入用户名和密码时,使用编辑器的提示部分。
远程登录
远程登录控制不需要在大脑和硬件之间进行任何其他布线。远程登录控制是一种网络类型的通信方法,并且需要在“构建器”中使用网络网关。*技术提示* 唯一需要的布线是网线,为硬件提供有效的IP地址。被控制的网络设备必须与大脑硬件位于同一网络上。
- 远程登录设置
**此选项标识大脑通过网络传递数据所需的端口。
*命令传输
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
*全局命令详细信息
**需要指明命令的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。如果协议的每个命令具有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都具有前缀或后缀。*技术提示* 当您知道设备以回车符终止所有命令时,通常会使用后缀。
*注释*在Kramer Control系统中,回车符编写为\x0D,换行符编写为\x0A。
- 登录详细信息
**如果被控制的设备需要先登录才能执行命令,则在此标识登录凭据。确保在登录部分的用户名和密码中区分大小写。*技术提示* 使用Hercules、Docklight或Terminal等软件进行的测试可以帮助您确定受控设备的正确登录凭据。
**当设备要求以唯一的方式输入用户名和密码时,将使用编辑器的提示部分。
UDP
UDP控制不需要在大脑和硬件之间进行任何额外的布线。UDP控制是一种网络类型的通信方法,并且需要在“构建器”中使用网络网关。*技术提示*唯一需要的布线是网线,为硬件提供有效的IP地址。被控制的网络设备必须与大脑硬件位于同一网络上。
- TCP / UDP设置
**此选项标识大脑通过网络传递数据所需的端口。\
**支持的UDP类型
- UDP单播
- UDP广播
- UDP组播
****从上面的列表中选择与协议文档中找到的选项匹配的选项
*命令传输
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
*全局命令详细信息
**需要指明命令的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。如果协议的每个命令具有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都具有前缀或后缀。*技术提示* 当您知道设备以回车符终止所有命令时,通常会使用后缀。
注释 在Kramer Control系统中,回车符编写为\x0D,换行符编写为\x0A。
- 登录详细信息
**如果被控制的设备需要先登录才能执行命令,则在此标识登录凭据。确保在登录部分的用户名和密码中区分大小写。*技术提示* 使用Hercules、Docklight或Terminal等软件进行的测试可以帮助您确定受控设备的正确登录凭据。
**当设备要求以唯一的方式输入用户名和密码时,将使用编辑器的提示部分。
KNX
KNX设备需要其他设备类型不支持的唯一通信。根据KNX的安装,KNX通讯方法中有单独的选项。这包括三层、两层或自定义的隧道与路由以及KNX地址类型。
- TCP/UDP设置
**此选项标识大脑通过网络传递数据所需的端口。
*命令传输
**支持的KNX类型
- KNX隧道
- KNX路由
****选择上面与KNX设备匹配的选项
**支持的KNX地址类型
***三级
***两级
***自定义
****选择上面与KNX设备匹配的选项
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
*全局命令详细信息
**需要指明命令的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。如果协议的每个命令具有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都具有前缀或后缀。*技术提示* 当您知道设备以回车符终止所有命令时,通常会使用后缀。
*注释*在Kramer Control系统中,回车符编写为\x0D,换行符编写为\x0A。
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都有前缀或后缀,但是当您知道设备以回车符终止所有命令时,后缀更为常见。如果是这种情况,请输入\ x0D作为反馈的后缀。
- 登录详细信息
**如果被控制的设备需要先登录才能执行命令,则在此标识登录凭据。确保在登录部分的用户名和密码中区分大小写。
**当设备要求以唯一的方式输入用户名和密码时,将使用编辑器的提示部分。
HTTP
HTTP控制不需要在大脑和硬件之间进行任何其他布线。唯一需要的布线是为电缆提供有效IP地址的网络电缆。HTTP控件是一种网络类型的通信方法,需要在构建器中使用网络网关。
- HTTP设置
**此选项标识端口要求、设备所需的HTTP方法、协议类型、数据位置和设备所需的HTTP版本。
*命令传输
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
*全局命令详细信息
**需要指明命令的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。如果协议的每个命令具有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都具有前缀或后缀。*技术提示* 当您知道设备以回车符终止所有命令时,通常会使用后缀。
*注意*在Kramer Control系统中,回车符编写为\x0D,换行符编写为\x0A。
- 登录详细信息
**如果被控制的设备需要先登录才能执行命令,则在此标识登录凭据。确保在登录部分的用户名和密码中区分大小写。
**当设备要求以唯一的方式输入用户名和密码时,将使用编辑器的提示部分。
中继和GPIO
*命令传输
**这是从大脑执行命令之间所需的延迟。某些设备在两次按键之间需要较长的延迟时间。*技术提示* 可以使用设备的物理遥控器进行测试。如果您不能立即向设备发送第二条命令,则需要调整传输值。
*全局命令详细信息
**需要指明命令的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。如果协议的每个命令具有相同的唯一开始/结束数据,则可以在编辑器的通信部分中添加这些选项。在此处添加值会将这些开始/结束值放在驱动程序内创建的每个命令中。在此字段中输入的值消除了将字符串的此部分添加到每个命令的要求。
**最大重试次数
***默认时间为零
**重试之间的时间(以秒为单位)
***默认时间为零
**轮询频率(以秒为单位)
***默认时间为零(以秒为单位)
***如果设备需要轮询,请在此处输入执行轮询的时间
**需要心跳
***如果需要心跳命令以使与设备的连接保持活动状态,请选中此框
**需要确认
***确认信息
****要求的确认类型
****如果设备需要确认,请选中复选框并从此列表中选择确认类型
*****单数表示设备回复一条成功消息
*****重复是设备发送接收到的命令时发送的命令
*****反馈表示设备将通过命令更改的更新值返回反馈
*****仅错误表示设备将仅返回对错误命令或执行失败的确认
*全局反馈参数
**需要指明反馈的开始(前缀)和结束(后缀),以便大脑知道相关信息在设备响应中的位置。并非所有设备都具有前缀或后缀。*技术提示* 当您知道设备以回车符终止所有命令时,通常会使用后缀。
*注释*在Kramer Control系统中,回车符编写为\x0D,换行符编写为\x0A。
Post your comment on this topic.
Scott wrote: Mar 13, 2023
LUA checksums are used within the command code by adding this to the end of each command $__CHECKSUM__$
Bjarte Lunde wrote: Dec 23, 2022
How is the LUA checksum referenced in the command code?
wang wrote: Dec 12, 2022
In device driver communication's defination, how to make TCP or UDP working at server mode? It seems work at client mode by default.