
MWD usually consists of a non-magnetic drill collar as in figure 33, containing a survey instrument in which are mounted 3 accelerometers, 3 magnetometers and some method of sending the data from these to surface.

Accelerometers measure the strength of the Earth’s gravity field component along their axis. Magnetometers measure the strength of the Earth’s magnetic field along their axis. With three accels mounted orthogonally, it is always possible to work out which way is ‘down’ and with three magnetometers it is always possible to work out which way is North (Magnetic). The following equations can be used to convert from three orthogonal accelerations, Gx, Gy and Gz (sometimes called Ax, Ay and Az) and three orthogonal magnetic field measurements, Bx, By and Bz (sometimes called Hx,Hy and Hz), to the inclination and direction (Magnetic).

In these equations the z axis is considered to point down hole and x and y are the cross axial axes. Some tools are arranged with the x axis downhole and y and z form the cross axial components so care should be taken when reading raw data files and identifying the axes. Similarly there is no consistency in units in that some systems output accelerations in gs, others in mg and some in analogue counts. Similarly the magnetometer outputs can be in counts, nano Teslas or micro Teslas.
The magnetometers are of various types but usually consist either of a coil with alternating current used to fully magnetise a core alternating with or against the Earth field component, or a small electro magnet used to cancel the Earth’s magnetic field component.
The accelerometers are simply tiny weighing machines, measuring the weight of a small proof weight suspended between two electromagnets. Held vertically they will measure the local gravity field and held horizontally they will measure zero. In theory we could measure inclination with only one accelerometer but a z axis accelerometer is very insensitive to near vertical movement due to the cosine of small angles being so close to unity. Besides we also require the instrument to tell us the toolface (rotation angle in the hole).
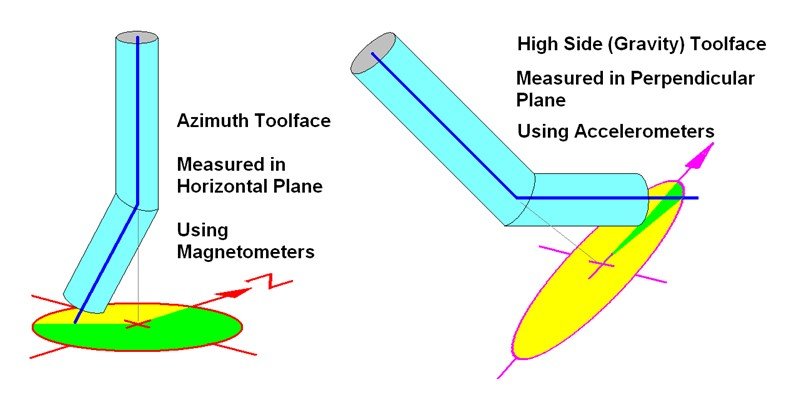
If we want the toolface as an angle from magnetic north corrected to our chosen reference (grid or true) we use the x and y magnetometers and resolve tan-1(Bx/By) and if we want the angle from the high side of the hole we resolve tan-1(Gx/Gy). For practical reasons, most MWD systems switch from a magnetic toolface to a high side toolface once the inclination exceeds a preset threshold typically set between 3 and 8 degrees.
Post your comment on this topic.