
The Camera Controller is used to control position, rotation and lens information from incoming camera tracking systems. The camera controller is typically used in conjunction with MR Cameras.
Camera Controller
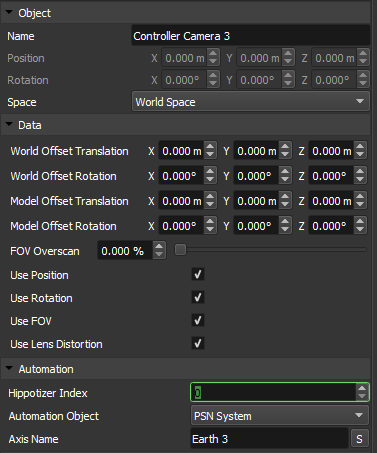
- World Offset Translation: Offsets the position of the camera controller from the incoming data of the tracking system.
- World Offset Rotation: Offsets the rotation of the camera controller from the incoming data of the tracking system.
- Model Offset Translation: Offsets the position of the object relative to the camera controller.
- Model Offset Rotation: Offsets the rotation of the object relative to the camera controller.
- FOV Overscan: Increases incoming FOV data for controlled MR cameras, Texture Mappers or Projectors.
- Use Position: Use incoming position data.
- Use Rotation: Use incoming rotation data.
- Use FOV: Use the incoming FOV data.
- Use Lens Distortion: Use the incoming Lens Distortion data.
Automation
- Hippotizer Index: Each controller needs a unique index to be controlled from Hippotizer, this setting will correspond to a Controller# in Hippotizer.
- Automation Object: Select the Automation system to get data from.
- Axis Name: Click the S button to get a list of active tracking objects being sent from the Automation System.