
MotionLinx とTwinCATの統合 /
MotionLinx データオブジェクト
リモートの MotionLinx-Ai および MotionLinx-IO デバイスとPCベースの TwinCAT コントローラー間のデータ交換は、 CANOpen over EtherCAT (CoE) です。 このプロトコルは「マスター」 コントローラー(PCベースのTwinCAT) と複数の「スレーブ」デバイス(MotionLinx-Ai/ MotionLinx-IO)間の周期的なデータ交換を提供します。MotionLinx-AiとMotionLinx-IOがサポートするデータオブジェクトタイプCoE プロセスデータオブジェクト (PDO) とサービスデータオブジェクト (SDO)です。
プロセスデータオブジェクト (PDO)
PDO は 送信 タイプと 受信 タイプに分けられます。- 送信PDOはMotionLinx-Ai/MotionLinx-IOからマスターコントローラーにデータを送信します。
- 受信PDOはマスターコントローラーからMotionLinx-Ai/MotionLinx-IOにデータを送信します。
MotionLinx-Ai Module送信PDOが2つ、受信PDOが3つ |
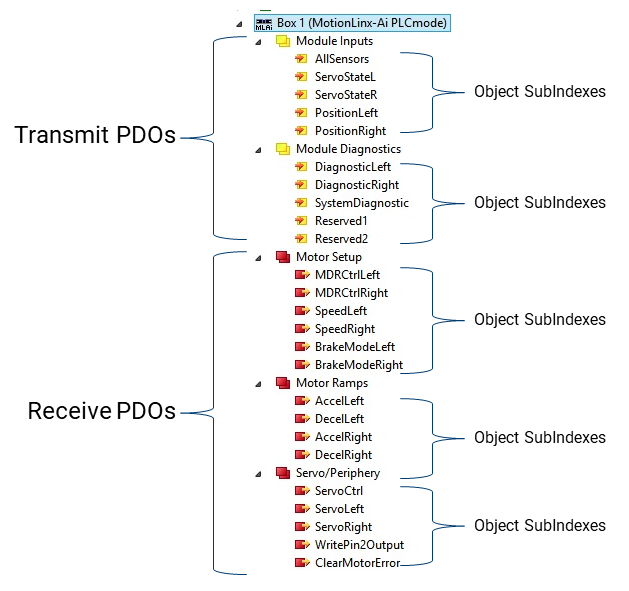 |
MotionLinx-IO Module送信PDOが1つ、受信PDOが1つ |
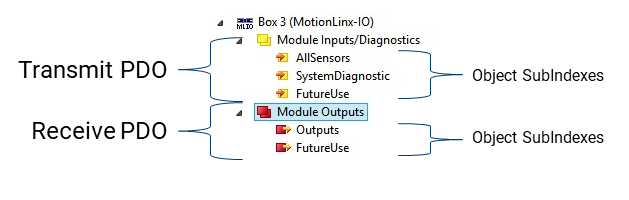 |
サービスデータオブジェクト(SDO)
SDO はPDOのような周期的な使用を目的としていないデータに使用されます。 SDO の使用は「優先度が低い」と考えることができ、「必要に応じて」呼び出されます。例えば初期構成の設定やモジュールからの非一過性データの読み取りは、典型的なSDOです。 SDOは読み取り/書き込みが可能です。