
MotionLinx とTwinCATの接続 /
TwinCAT プロジェクトにモジュールを追加する
ESI ファイルを TwinCATIDE にインストールし、プロジェクトソリューションを作成したら、次は制御が必要な各MotionLinxデバイスのESIインスタンスを追加します。この例では、ソリューションを“Test project”と呼んでいます。
| 画面で挿入したいデバイスを選択し、デバイス名を入力します。この例では MotionLinx-Ai タイプのデバイスを選択し、デバイス名として “Box1” を入力します。また、複数のモジュールを同時に作成したいので、 “5”と入力しました。 |  |
| 必要な数量の MotionLinx-Ai を挿入したら、プロジェクトツリーを展開して個々のデバイスを確認することができます。この例では MotionLinx-Ai を5台挿入しました。 MotionLinx-Ai が挿入されると、 TwinCAT が自動的に数字のサフィックス(接尾辞)を付加するため、各デバイスは固有の名前になります。 |  |
| 同様の手順で、 TwinCAT プロジェクトに MotionLinx-IO を挿入します。この例では別のプロジェクトに3台のMotionLinx-IOを挿入します。 | 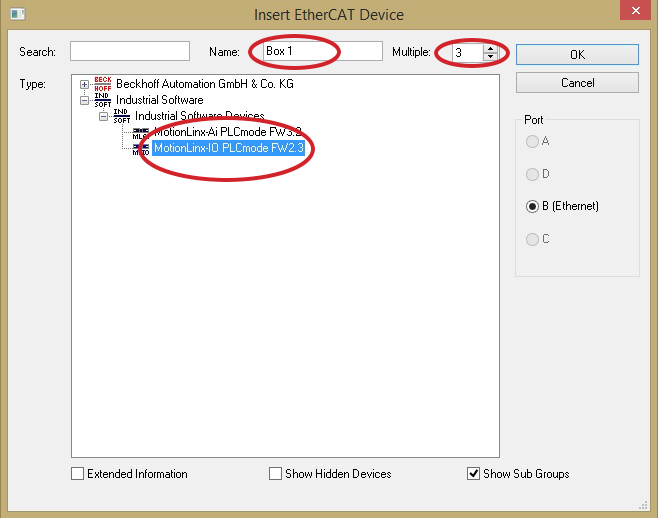 |
| プロジェクトツリーを展開すると、3台の MotionLinx-IO が表示されます。 TwinCAT が自動的に数字のサフィックスを追加するので各デバイスは固有の名前になります。 | 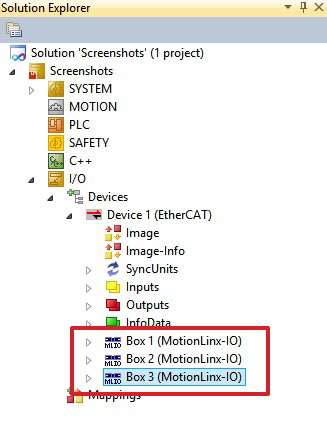 |
オンラインでのやり方
TwinCAT PCを物理的ネットワークまたはデバイスに接続して、物理ネットワークをスキャンしデバイスを見つけると、ネットワークトポロジーに接続されている順にプロジェクトソリューションに自動的に追加されます。デバイスのネットワークスキャンの詳細については、 TwinCAT のマニュアルを参照してください。