
Integrating MotionLinx with TwinCAT /
MotionLinx Data Objects
The data exchange between remote MotionLinx-Ai and MotionLinx-IO devices and the PC based TwinCAT controller is CANOpen over EtherCAT (CoE). This protocol provides for cyclic data exchange between a “Master” controller (PC based TwinCAT) and multiple “Slave” devices (MotionLinx-Ai / MotionLinx-IO modules). The data object types supported by MotionLinx-Ai and MotionLinx-IO modules are CoE Process Data Objects (PDOs) and Service Data Objects (SDOs).
Process Data Objects (PDO)
PDOs are subdivided into Transmit and Receive types:- Transmit PDOs send data from the MotionLinx-Ai / MotionLinx-IO modules to the Master Controller
- Receive PDOs send data from the Master Controller to the MotionLinx-Ai / MotionLinx-IO modules
MotionLinx-Ai Module2 Transmit PDOs and 3 Receive PDOs |
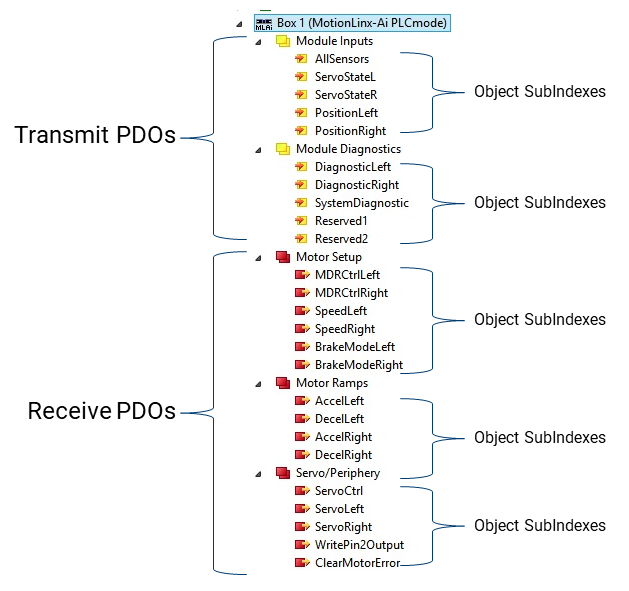 |
MotionLinx-IO Module1 Transmit PDO and 1 Receive PDO |
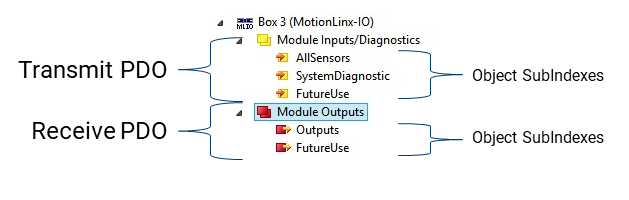 |
Service Data Objects (SDO)
SDOs are used for data that is not intended to be cyclic like PDOs. The use of SDOs can be thought of as “lower priority” and are invoked on an “as needed” basis. For example, setting up the initial configuration or the reading of non-transitory data from the module are typical SDOs provided. SDOs can be read or write.