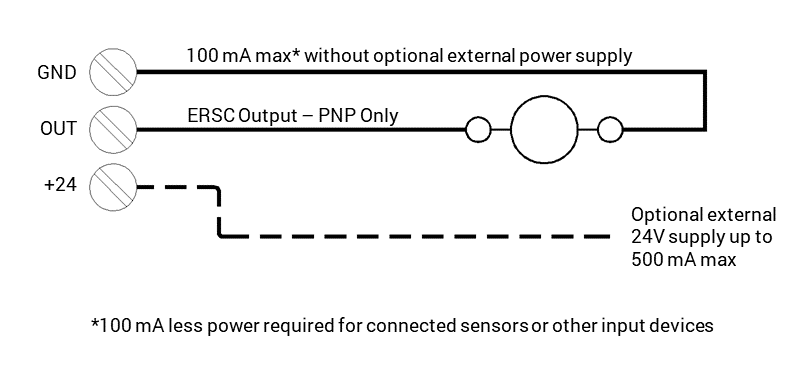
!If using optional external power supply, this external supply’s DC common MUST be connected to ERSC power supply DC common