
In general, when you perform an Auto-Configure procedure, *ConveyLinx-ERSC Module*s will configure in ZPA mode. If one sensor is connected (either Left or Right) and two motors are connected, the module is automatically configured as a single logical zone and will run both motors at the same time. If the modules are at factory default, both motors will be at factory default settings. Otherwise, the motor settings will be the ones last set by EasyRoll.
Open Loop
If open loop speed control is desired; then set both motors to the same settings in EasyRoll
Closed Loop
When using closed loop control, it is important to never place both motors into closed loop control because they will “fight” each other particularly when accelerating and decelerating. Perform the following basic steps in EasyRoll for the selected ERSC module:
 |
||
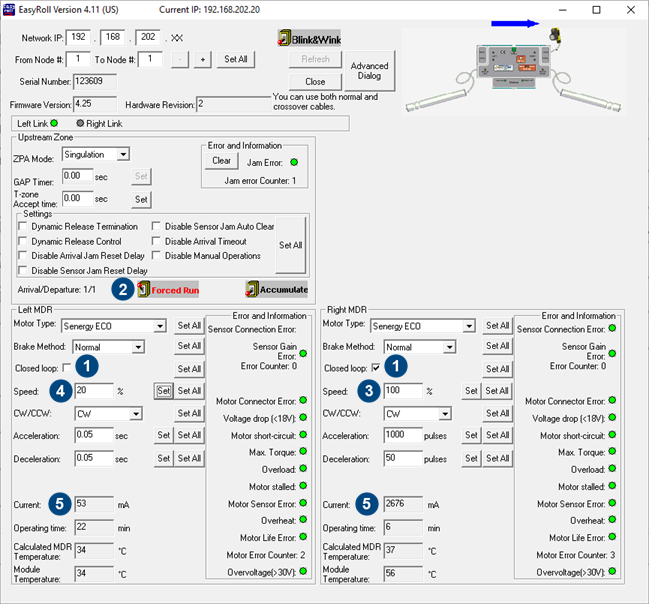
| Place discharge end motor in closed loop and infeed end motor in open loop | ||
| Force Run and both motors should run | ||
| Enter desired speed for the zone for the closed loop motor | ||
| Enter slow speed in open loop motor | ||
| Verify that the open loop motor current is non zero and that closed loop current is in the range of the rated current | ||
 |
||
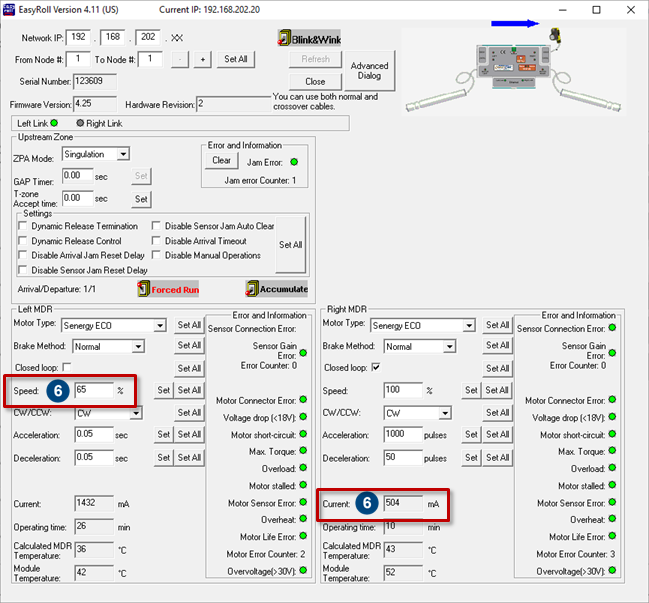
| Adjust the open loop motor’s speed until the closed loop motor’s current is approximately 500 to 800 mA | ||
| Please Note that the speed values shown are examples only. The actual speed and current values you see may be different | ||
 |
||
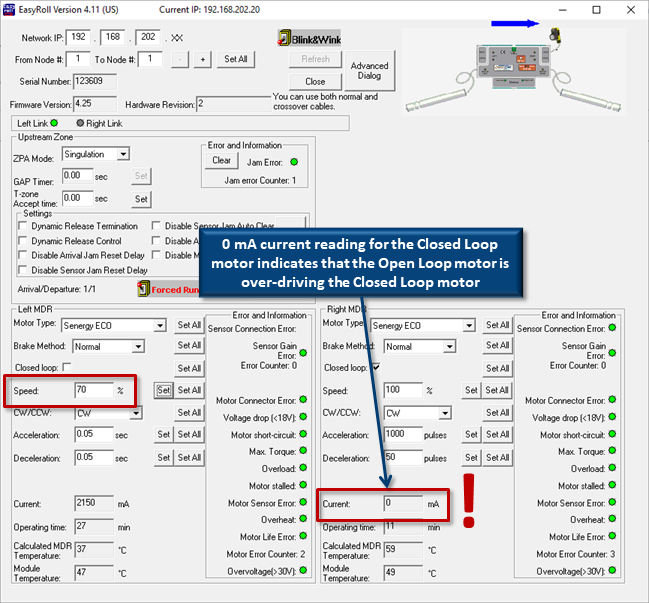
| It is important to not set the Open Loop motor’s speed so high as to make the Closed Loop motor’s current draw be 0 mA | ||
| In our example, previously our setting of 65% speed on the Open Loop motor resulted in @500 mA draw on the Closed Loop motor. But an adjustment to 70% speed on the Open Loop motor results in 0 mA current draw on the Closed Loop motor. This will eventually cause an overheat error on the Closed Loop motor. | ||