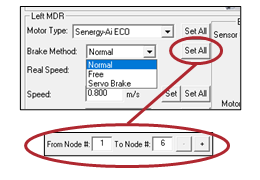
The Brake Method pull-down box lists all the holding brake methods available for the module. Normal is the default setting upon completion of the Auto-Configuration Procedure. The new settings are downloaded to the selected Node upon selecting a new item from the list.
| In this example, clicking Set All will download the selected setting to the Left MDR of all modules entered in the range of Nodes at the top of the main screen in the From Node # / To Node # boxes. If for example these boxes had the values of 1 and 6; changing the selection in the Brake Method pull down will change Node 1 and clicking Set All will change Nodes 2 thru 6 to the same setting as Node 1 |
![]() |
| Method |
Description |
| Normal |
Once the controls have decelerated the rotor to a stop, the motor coil are internally connected. The permanent magnet forces in the rotor and the mechanical inertia of the gearbox holds the rotor in place. This is the MDR industry standard holding brake method and is often termed short circuit or shunt. Normal is the default factory setting for all module zones from the Auto-Configuration Procedure |
| Free |
Once the controls have decelerated the rotor to a stop, the motor coils are internally disconnected and only the mechanical gearbox inertia holds the rotor in place |
| Servo Brake |
When the controls have decelerated the rotor to a stop, the processor notes the Hall Effect sensor status. If the Hall Effect sensor status changes indicating a change in position of the rotor, the controls will inject current into the motor coils in the proper sequence to move the rotor back to its original stop position |
!Servo Brake function utilizes motor power and depending on the torque demanded by the motor to hold the load the potential for heat build-up exists